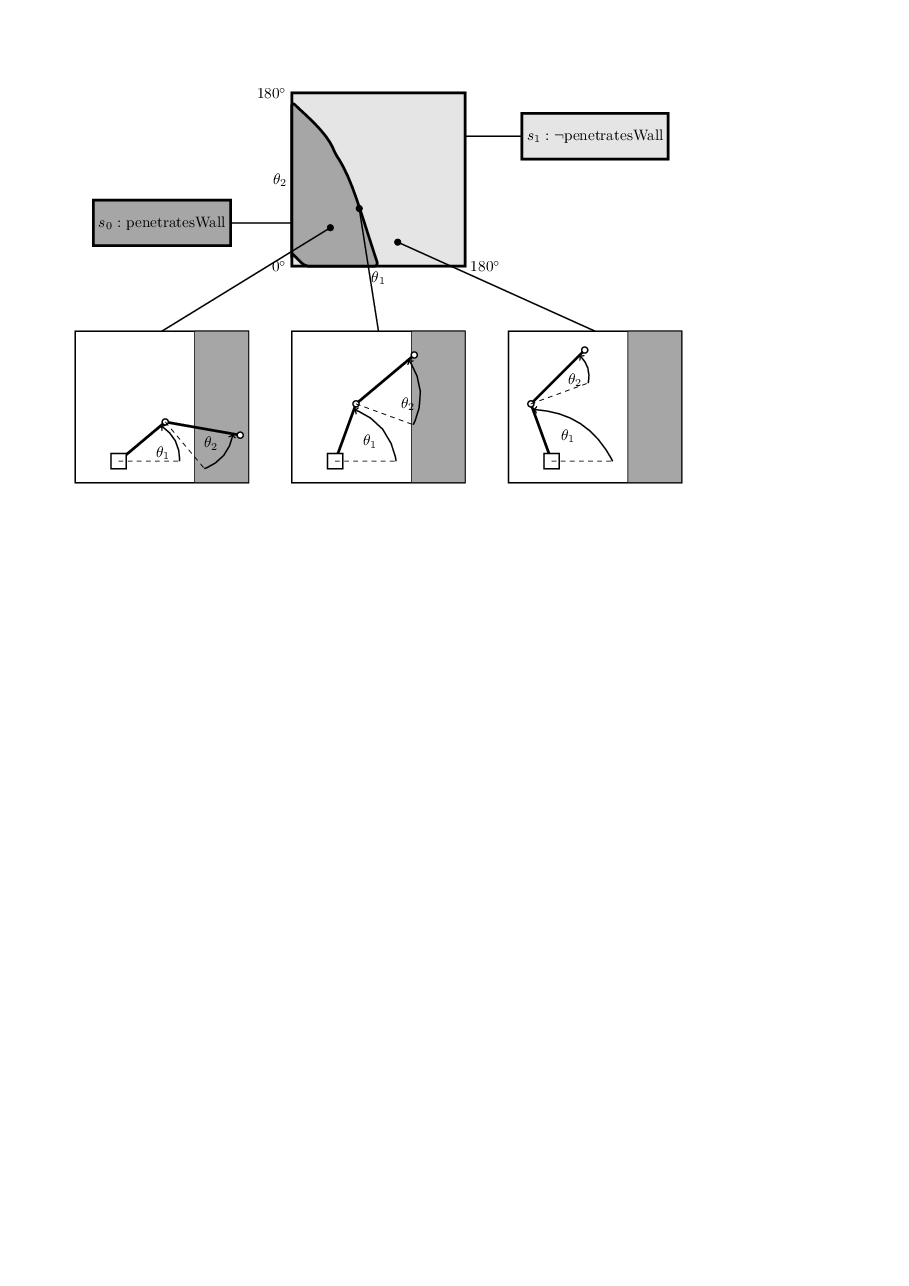
ロボットアーム
レンダリング結果
TeXソース
TeXソース
入力コード
\documentclass{tetsujsarticle}
\usepackage{tetsuryoku}
\begin{document}
\newdimen\xbase
\newdimen\ybase
\def\endDom{4}
\begin{tikzpicture}[domain=0:4]
\def\ColSymBorder{black}
\def\ColSymBorderTwo{black}
\def\ColSymFill{gray!70}
\def\ColSymFillTwo{gray!20}
\def\wallColor{gray!70}
\tikzstyle{block} = [draw, color=\ColSymBorder, ultra thick, fill=\ColSymFill, rectangle, minimum height=3em, minimum width=6em];
\draw[color=\ColSymBorderTwo, ultra thick, fill=\ColSymFillTwo] (0,0) rectangle (4,4);
\draw (0,0) node[below,left]{$0^\circ$} -- (4,0) node[below,midway] {$\theta_1$} node[below,right] {$180^\circ$};
\draw (0,0) -- (0,4) node[left,midway] {$\theta_2$} node[left] {$180^\circ$};
\def\wallOffset{50pt}
\def\marginOff{5pt}
\draw[ultra thick,color=\ColSymBorder,fill=\ColSymFill, rounded corners=3pt]
(0,0.2) .. controls (0,1) and (0,2) .. (0,3.8)
.. controls (0.3,3.5) and (0.8,3.1) .. (1,2.6)
.. controls (1.4,2.0) and (1.6,1.2) .. (2,0)
.. controls (1,0) and (0.5,0) .. (0.3,0)
.. controls (0.2,0.1) and (0.1,0.2) .. (0,0.3);
%.. controls (3,0) and (2,0) .. (0,0);
\newcounter{i}
\setcounter{i}{0}
\foreach \x in {1,100,...,180}{
\foreach \y in {1,100,...,180}{
%\ifthenelse{ {cos(\x)*40+50/cos(90-(\x+\y))} < 50}
%\ifthenelse{ \lengthtest{ {\f{\x}} pt < 50 pt}}
\pgfmathparse{ (
(cos(\x)*40pt+sin(\x+\y)*50pt)<(\wallOffset+\marginOff)) &&
(cos(\x)*40pt+sin(\x+\y)*50pt)>(\wallOffset-\marginOff))) ?1:0}
\ifnum\pgfmathresult>0
%penetrates the wall
\stepcounter{i}
\else
%out of the wall
\fi
}
}
\draw[thick,color=\ColSymBorder] (-2,1) -- (0,1);
\node[block] at (-3,1) {$s_0: $ penetratesWall};
\draw[thick,color=\ColSymBorderTwo] (6,3) -- (4,3);
\node[draw, color=\ColSymBorderTwo, ultra thick, fill=\ColSymFillTwo, rectangle,
minimum height=3em, minimum width=6em] at (7,3) {$s_1: \neg$penetratesWall};
%%%%%%%% PAINTING THE ROBOT STARTS HERE:
\newcommand*{\Robot}[4]{
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
\pgfmathsetlengthmacro{\rone}{40pt} %length link1
\pgfmathsetlengthmacro{\rtwo}{50pt} %length link2
\pgfmathsetlengthmacro{\rw}{10} %width of base rectangle
\pgfmathsetlengthmacro{\thetaone}{#1} %angle base-link1
\pgfmathsetlengthmacro{\thetatwo}{#2} %angle link1-link2
\coordinate (base) at (#3,#4); %base coordinates
%\coordinage (cspace) at ({#1/180*\endDom},{#2/180*\endDom})
\path (base);
\pgfgetlastxy{\xbase}{\ybase};
\draw[thick,color=black] ({\xbase+1cm},{\ybase+3.0cm}) -- ({#1/180*\endDom},{#2/180*\endDom});
\draw[fill=black] ({#1/180*\endDom},{#2/180*\endDom}) circle (2pt);
\draw[thick,color=black] ({\xbase-1cm},{\ybase-0.5cm}) rectangle
({\xbase+3cm},{\ybase+3cm});
\draw[fill=\wallColor] ({\xbase+\wallOffset}, {\ybase-0.5cm}) rectangle
({\xbase+3cm}, {\ybase+3cm});
\pgfmathsetlengthmacro{\tx}{\rone*cos(\thetaone)+\xbase}
\pgfmathsetlengthmacro{\ty}{\rone*sin(\thetaone)+\ybase}
\coordinate (t1) at (\tx,\ty);
\pgfmathsetlengthmacro{\sx}{\rtwo*sin(\thetaone+\thetatwo)+\tx}
\pgfmathsetlengthmacro{\sy}{-\rtwo*cos(\thetaone+\thetatwo)+\ty}
\coordinate (t2) at (\sx,\sy);
\draw[ultra thick,black] (base) -- (t1);% node[below] {$\tx \ybase \xbase \ty$};
\draw[ultra thick,black] (t1) -- (t2);% node[below] {$\tx \ybase \xbase \ty$};
\draw[thick,color=black,fill=white!30] ({\xbase-0.5*\rw},{\ybase-0.5*\rw}) rectangle++ (\rw,\rw);
\draw[thick,color=black,fill=white!10] (t1) circle (2pt);
\draw[thick,color=black,fill=white!10] (t2) circle (2pt);
%% dashed line to represent link two at 0 degree
\pgfmathsetlengthmacro{\rtmp}{\rone }
\pgfmathsetlengthmacro{\tmpx}{\rtmp*sin(\thetaone)+\tx}
\pgfmathsetlengthmacro{\tmpy}{-\rtmp*cos(\thetaone)+\ty}
\coordinate (tmp1) at (\tmpx,\tmpy);
\draw[dashed,color=black] (t1) -- (tmp1);
%% dashed line to represent link one at 0 degree
\pgfmathsetlengthmacro{\tmpx}{\rone+\xbase}
\pgfmathsetlengthmacro{\tmpy}{\ybase}
\coordinate (tmp0) at (\tmpx,\tmpy);
\draw[dashed,color=black] (base) -- (tmp0);
\pgfmathsetlengthmacro{\tmpx}{\rone+\xbase}
\pgfmathsetlengthmacro{\tmpy}{\ybase}
\pgfmathsetlengthmacro{\tmpx}{0.9*\rone*cos(\thetaone)+\xbase}
\pgfmathsetlengthmacro{\tmpy}{0.9*\rone*sin(\thetaone)+\ybase}
\coordinate (tmp0t) at (\tmpx,\tmpy);
\pgfmathsetlengthmacro{\tmpx}{0.9*\rtwo*sin(\thetaone+\thetatwo)+\tx}
\pgfmathsetlengthmacro{\tmpy}{-0.9*\rtwo*cos(\thetaone+\thetatwo)+\ty}
\coordinate (tmp1t) at (\tmpx,\tmpy);
% ($(O)+(\StartAngle:-\Radius)$) is the center of the yellow circle
\draw[bend right,thick,->] (tmp1) to node [auto] {$\theta_2$} (tmp1t);
\draw[bend right,thick,->] (tmp0) to node [auto] {$\theta_1$} (tmp0t);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
}
\Robot{40}{40}{-4}{-4.5}
\Robot{70}{60}{1}{-4.5}
\Robot{110}{25}{6}{-4.5}
\end{tikzpicture}
\end{document}